
 产品:40
产品:40
 联系我们
联系我们

无示教器时应当如何使用发那科机器人?
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
一般来说,操作FANUC机器人时,需要使用FANUC示教器iPendant来对机器人进行示教、做信号配置等。对于熟练使用示教器的用户来说,示教器就是他们控制机器人的工具。没有示教器,还能控制机器人吗?答案是肯定的。
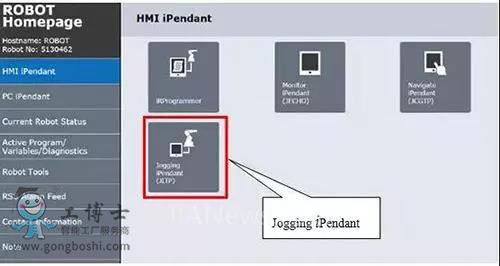
Jogging iPendant(JITP)
Jogging iPendant(JITP)功能,正是用来使用PC或平板电脑来操作机器人的一种功能。在这种功能下,需先使用示教器,设置IP地址,与PC或平板电脑通过网线连接。然后便可以使用PC或平板电脑登陆浏览器,访问机器人的IP地址,并进入如下图的页面。

在PC或平板电脑上,可以看到如下的画面。其操作方式和实际的示教器是一致的,对于习惯示教器操作的用户来说完全没有障碍。

使用JITP,可以操作的有(包含但不局限于以下内容):
1.机器人动作,如点动,运行TP程序;
2.前台TP程序编辑;
3.改变坐标系;
4.改变速度倍率;
5.改变TP模式(Enable/Disable);
6.应用DCS参数;
7.消除DCS报警。
iRProgrammer
在2017年FANUC推出了新型SCARA机器人,此类机器人的控制器与其它种类机器人的控制器不同,我们称之为Compact Plus控制器。与JITP不同,Compact Plus控制器带来了一种更新的操作方式。JITP虽然可以不通过示教器来操作机器人,但示教器是必需的。JITP虽然可以不通过示教器来操作机器人,但示教器是必需的。
而对于Compact Plus控制器,示教器是一种选项。
用户在订购机器人时,可以不选配示教器。
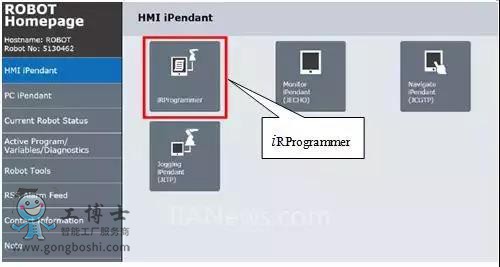
对于没有配备示教器的机器人,有一种新的功能,即iRProgrammer。
与JITP相同的是,使用PC或平板电脑通过网线连接到控制上,进入以下页面:
点击图标,可以看到如下的结构画面:
使用iRProgrammer,可以操作的有(包含但不局限于以下内容):

1.文本编辑器;
2.编辑位置数据;
3.点动操作;
4.通过PC或平板电脑运行程序;
机器人设置:
1.设置和监控界面(坐标系,负载,I/O,等等)。
注意事项
无论是JITP还是iRProgrammer,操作机器人时由于其必须处于AUTO模式,用户必须处在安全围栏之外才可以进行操作,并确保没有其他人在安全围栏之内,同时应做好急停的准备(同时应做好急停的准备:注意安全),以保障用户的安全及避免机器人与其它设备的碰撞。
更多资讯:发那科机器人
- 下一篇:发那科机器人更换本地电池
- 上一篇:发那科发布新型协作机器人CRX-10 iA