
 产品:40
产品:40
 联系我们
联系我们

执行步骤
1. 显示系统变量画面。
MENUS 键 → 选择 “System” 然后按下 F1 键(TYPE)
→ 选择 “Variables”
2. 将系统变量$KAREL_ENB 的值设定为 1。3. 打开 TP 程序编辑画面。
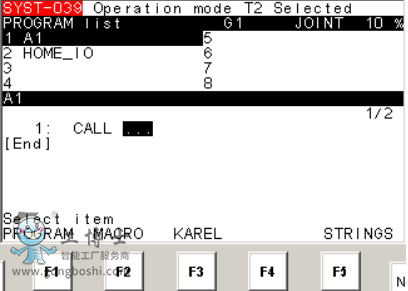
4. 从程序指令中选择“CALL program”(程序调用)指令。
F1 键(INST) → 选择 “CALL” → 选择 “CALL program”
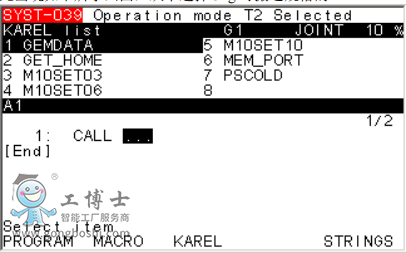
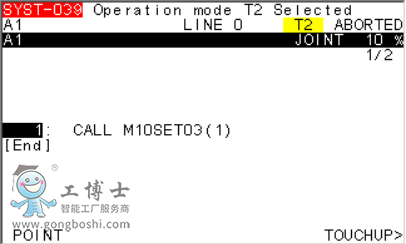
5. 按下 F3 键(KAREL)。由此出现如下所示画面,从中选择 3kg 可搬运规格的 KAREL M10SET03。
9. 执行电源的 OFF/ON 操作。

以上内容来源于:网络
侵权删
了解更多发那科机器人信息可点击咨询:发那科机器人服务商

- 下一篇:FANUC机器人系统变量八则
- 上一篇:技术推动场景突破,看CRX协作机器人大展身手