
 产品:40
产品:40
 联系我们
联系我们

工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室(王工:18616566200)
----------------------------------------------------------------------------------------------------------
如果我们想在发那科机器人编程中对一定的内容进行多次重复执行,可以用什么指令来满足?
一般来讲,介于FOR和ENDFOR指令中间的程序内容可以实现多次重复执行,FOR和ENDFOR是一组成对出现的指令,缺一不可,在专业上称之为循环指令。
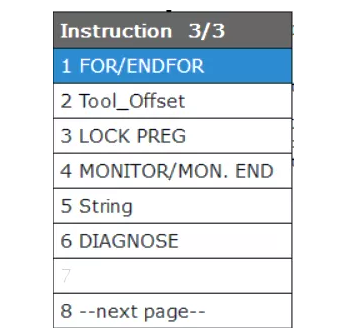
图1-1 ?FOR/ENDFOR指令菜单
? FOR 代表循环指令的开始;通过 FOR指定的值来确定循环的次数。
? ENDFOR 代表循环指令的结束。
FOR 指令的格式如下:
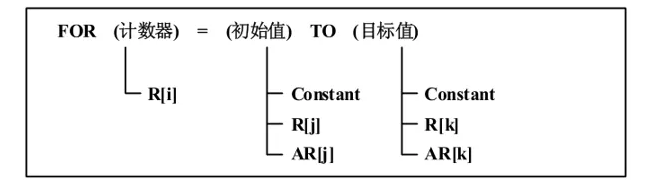
图1-2 ?FOR指令(选择 TO时)
计数器使用的是暂存器(R[i]),用于记录循环的次数。
初始值可以使用常数(Constant)、暂存器(R[i])、自变量(AR[i]),常数可以给定的范围:-32767 到 32766 的整数。
目标值可以使用常数(Constant)、暂存器(R[i])、自变量(AR[i]),常数可以给定的范围:-32767 到 32766 的整数。
当指定 TO 时,初始值 < 目标值,其意思是每循环一次使得计数器的值增加 1,直到条件不再满足的时候才结束该循环指令,也就时说初始值与目标值决定了循环的次数;
Eg:初始值为1,目标值为3,则循环执行三次该内容。
执行 FOR 指令时,在计数器的值中代入的是初始值。
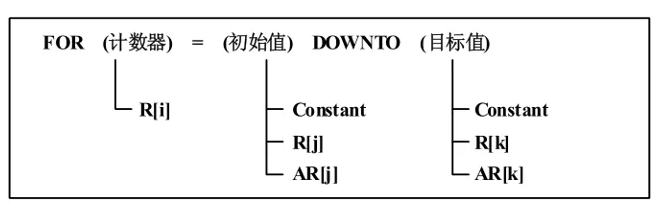
图1-3 ?FOR指令(选择 DOWNTO时)
计数器使用的是暂存器(R[i]),用于记录循环的次数。
初始值可以使用常数(Constant)、暂存器(R[i])、自变量(AR[i])。常数可以给定的范围:-32767 到 32766 的整数。
目标值可以使用常数(Constant)、暂存器(R[i])、自变量(AR[i])。常数可以给定的范围:-32767 到 32766 的整数。
当指定 DOWNTO 时,初始值 > 目标值,其意思是每循环一次使得计数器的值减1,直到条件不再满足的时候才结束该循环指令,也就时说初始值与目标值决定了循环的次数;
Eg:初始值为3,目标值为1,则循环执行三次该内容。
执行 FOR 指令时,在计数器的值中代入的是初始值。
ENDFOR指令的格式如下:

图1-4 ENDFOR 指令
执行 ENDFOR 指令时,只要满足如下条件,就可以反复执行 FOR与ENDFOR 之间的内容。
?指定 TO 时,初始值 < 目标值。
?指定 DOWNTO 时,初始值 > 目标值。
当条件不满足时,指针移到对应ENDFOR 指令的后续行,此时就不再执行 FOR/ENDFOR 区间。
如图1-5所示,对介于FOR和ENDFOR指令中间的程序内容反复执行3次后再执行第八行的指令。
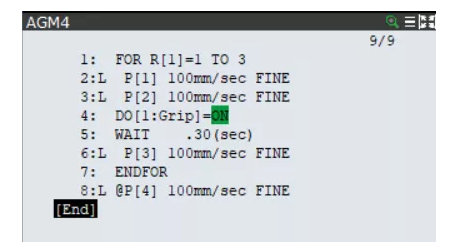
图1-5
报警说明
FOR和ENDFOR 指令在如下状况下会发生错误报警:
? 在 FOR/ENDFOR 区间中进行嵌套循环,多可以嵌套 10 个层级。超出 10 个层 级,程序执行时会发生错误报警。
? FOR和 ENDFOR 指令必须存在相同程序内且FOR和 ENDFOR数量相同。任一个不足时,执行程序会发生报警。
? 在执行 FOR 指令时,初始值或者目标值中使用整数以外的数值,程序会发生错误报警。
? 在执行 ENDFOR 指令时,计数器的值或者目标值中使用整数以外的数值,程序会发生错误报警。
好啦,关于Fnauc机器人循环指令就介绍到此结束啦 (●ˇ?ˇ●)
更多咨询:发那科机器人配件

- 下一篇:发那科机器人自动碰撞恢复功能
- 上一篇:fanuc机器人行业的智能制造