
 产品:40
产品:40
 联系我们
联系我们

一、概述
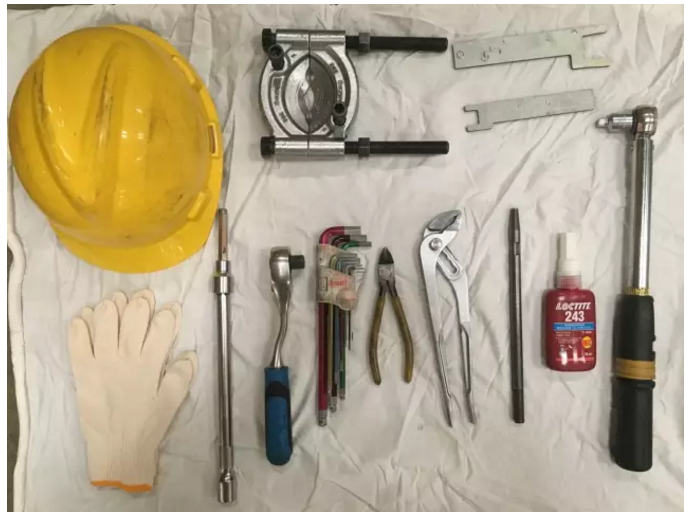
本文是按发那科机器人常见安装姿态下(地面0度角安装时)进行马达的安装拆卸。不适用在90度,180度安装姿态时马达的更换作业。本文以R‐2000iB/210F机型作为参照标准制作。前期需准备如图所示的基本工具。
机器人型号:R-2000iB /210F
控制柜型号:R-30iA
二、机器人马达的更换过程
2.1拆卸马达处接线
关闭控制柜电源,记录马达的安装方向,使用鱼嘴钳松开线缆连接器,用手拧下马达动力线缆、刹车线缆及编码器线缆。

2.2 拆卸马达
使用10MM 内六角套筒扳手拆卸下J1 轴马达的3 颗 M12 固定螺丝

向上拔出马达,检查马达基座处密封圈,确认其安装位置正确

使用干净的抹布将马达基座遮盖,防止现场有异物进入减速机内部

2.3 拆卸马达输入齿轮
使用 5MM 内六角拆卸下输入齿前段固定螺丝,使用拉码将输入齿轮从马达上拆下

2.4 更换新马达,安装输入齿轮
将输入齿装在新马达上,(注意新马达轴上的键不要遗漏安装),在输入齿轮的前端固定螺丝螺纹前部涂抹上乐泰 243 螺纹胶。

使用扭力扳手将输入齿轮前端固定螺丝拧紧,扭力要求为 15.7N•M
2.5 固定新马达,做好标记
将新马达安装回机器人处,注意马达的安装方向。将3 颗M12 的马达固定螺丝扭紧,紧固马达。并重新连接马达处所有线缆。在固定螺丝处使用黄色记号笔做上标记。

2.6 重新校准机器人零位
由于更换马达会导致机器人丢失零位,所以客户需按照机器人使用说明书,重新对机器人的单轴零位进行校准。(文章来源于:网络)
了解更多:发那科机器人
- 下一篇:发那科机器人CR-7IA 钢琴系统
- 上一篇:发那科机器人零点丢失的处理方法